В Японии создана кожа для роботов [ Редагувати ]
 В Японии создана кожа для роботов
В Японии создана кожа для роботов
Скоро у роботов появится осязание. Профессор Сомея и его команда из Токийского университета уже несколько лет работают над созданием искусственной электронной кожи. Пока японские ученые смогли создать лишь кожу, способную определять давление. К тому же ее способность распространялась лишь на плоские объекты. На этой неделе ученые объявили, что им удалось усовершенствовать старую искусственную кожу. На этот раз она способна определять и давление, и температуру. Более того, эта кожа адаптируется к трехмерным объектам, так как отличается от старой версии большей эластичностью, пишет Le Figaro.
Разработка искусственной кожи имеет ключевое значение для создания домашних роботов. "Роботам, работающим в доме, совершенно необходимо осязание", - считает Такао Сомея. Ведь они должны уметь брать в руки предметы и людей, не причиняя им повреждений. "Если робот имеет дело с инвалидом, он должен уметь осторожно приподнимать его, а значит, у него должно быть хорошо развитое осязание", - отмечает Такао Сомея.
Запустив свою исследовательскую программу в 2002 году, японские ученые столкнулись с рядом проблем. Первая из них состояла в получении гибкого электронного замыкания, обладающего высокой проводимостью. Ведь электронные чипы, которыми снабжено большинство наших компьютеров, сделаны из кремния. У кремния есть два больших недостатка: он стоит дорого и не обладает гибкостью. Поэтому ученым пришло в голову использовать новейшую технологию органических полупроводников, позволяющую создавать пластиковые электронные чипы. "Эти чипы гибки и дешевы, - поясняет Такао Сомея. - Ведь они в буквальном смысле отпечатаны на пластиковой пленке. И производить их несложно".
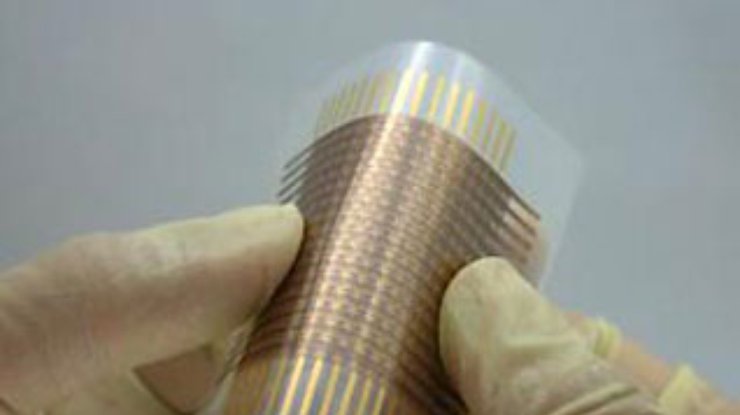
В результате ученые получили гибкую матрицу, которая адаптировалась к двухмерным предметам. Однако эта матрица, имевшая вид листка бумаги, не растягивалась. Она не могла охватывать трехмерные предметы, такие, как каркас робота. Поэтому они решили изготовить матрицу в форме "рыбацкой сети" с 4-миллиметровыми ячейками, способную охватывать предметы более сложной формы.
Вторая проблема состояла в том, чтобы эта кожа могла взаимодействовать с внешней средой. Чтобы робот мог "потрогать" предмет, информация (о давлении предмета на кожу, о температуре или влажности) поступала к нему в виде электрического сигнала. Ученые разработали антенны-рецепторы, преобразующие физические данные (такие, как температура или давление) в электрический сигнал, пишет издание.